What is the difference between embedded OS and RTOS?
2 Answers
Embedded Operating Systems (OS) and Real-Time Operating Systems (RTOS) are both designed to manage hardware resources and execute software tasks, but they serve different purposes and have distinct characteristics. Here’s a detailed comparison of the two:
### **Embedded OS**
**Definition**:
An Embedded Operating System is designed to run on embedded systems, which are specialized computing systems dedicated to performing specific tasks. Examples include appliances, consumer electronics, and automotive systems.
**Characteristics**:
1. **Purpose**: Provides a complete environment to run applications in embedded devices. It often includes a user interface, file management, and networking capabilities.
2. **Complexity**: Typically more complex than an RTOS, with support for multitasking, memory management, and various system services.
3. **Flexibility**: Often designed to handle a wide range of tasks and can support multiple applications simultaneously.
4. **Resource Utilization**: May require more system resources (CPU, memory) compared to an RTOS, though embedded OSes are generally optimized for the specific hardware they run on.
5. **Examples**: Embedded versions of Linux (like Embedded Linux or Yocto), Windows Embedded, and Android.
**Usage**:
- **Consumer Electronics**: Smartphones, smart TVs, and home appliances.
- **Automotive Systems**: Infotainment systems, navigation systems.
- **Industrial Equipment**: Factory automation systems, control systems.
### **RTOS (Real-Time Operating System)**
**Definition**:
A Real-Time Operating System is designed to guarantee that critical tasks are performed within a specific time frame. It prioritizes the predictability and timing of task execution over general-purpose functionalities.
**Characteristics**:
1. **Purpose**: Ensures that high-priority tasks are executed within precise timing constraints, crucial for systems where timing is critical.
2. **Complexity**: Generally simpler than a traditional embedded OS, focusing on deterministic behavior and minimal latency.
3. **Predictability**: Provides strict timing guarantees, ensuring that critical tasks meet deadlines. It supports predictable task switching and response times.
4. **Resource Utilization**: Designed to be highly efficient with minimal resource overhead to meet real-time requirements.
5. **Examples**: FreeRTOS, VxWorks, QNX, Micrium.
**Usage**:
- **Automotive Systems**: Airbag control systems, ABS (Anti-lock Braking Systems).
- **Industrial Control**: Robotics, machine control systems.
- **Medical Devices**: Pacemakers, infusion pumps.
- **Telecommunications**: Network routers, switches.
### **Key Differences**
1. **Timing Guarantees**:
- **Embedded OS**: May not provide strict timing guarantees. Suitable for applications where timing is important but not mission-critical.
- **RTOS**: Provides precise timing guarantees and predictable response times. Essential for applications where timing constraints are critical.
2. **Complexity and Features**:
- **Embedded OS**: Often more complex with additional features like advanced networking, user interfaces, and multi-tasking.
- **RTOS**: More focused on efficient task scheduling and minimal latency, often with fewer features and a simpler design.
3. **Resource Utilization**:
- **Embedded OS**: Might use more resources, depending on the features and functionalities provided.
- **RTOS**: Designed to use minimal resources to maintain real-time performance.
4. **Application Scope**:
- **Embedded OS**: Used in a wide range of embedded applications, from consumer electronics to industrial machinery.
- **RTOS**: Used in systems where meeting real-time constraints is crucial, such as aerospace, automotive, and medical applications.
In summary, while both embedded OS and RTOS are used in embedded systems, the choice between them depends on whether you need real-time performance or a more general-purpose system with broader features.
### **Embedded OS**
**Definition**:
An Embedded Operating System is designed to run on embedded systems, which are specialized computing systems dedicated to performing specific tasks. Examples include appliances, consumer electronics, and automotive systems.
**Characteristics**:
1. **Purpose**: Provides a complete environment to run applications in embedded devices. It often includes a user interface, file management, and networking capabilities.
2. **Complexity**: Typically more complex than an RTOS, with support for multitasking, memory management, and various system services.
3. **Flexibility**: Often designed to handle a wide range of tasks and can support multiple applications simultaneously.
4. **Resource Utilization**: May require more system resources (CPU, memory) compared to an RTOS, though embedded OSes are generally optimized for the specific hardware they run on.
5. **Examples**: Embedded versions of Linux (like Embedded Linux or Yocto), Windows Embedded, and Android.
**Usage**:
- **Consumer Electronics**: Smartphones, smart TVs, and home appliances.
- **Automotive Systems**: Infotainment systems, navigation systems.
- **Industrial Equipment**: Factory automation systems, control systems.
### **RTOS (Real-Time Operating System)**
**Definition**:
A Real-Time Operating System is designed to guarantee that critical tasks are performed within a specific time frame. It prioritizes the predictability and timing of task execution over general-purpose functionalities.
**Characteristics**:
1. **Purpose**: Ensures that high-priority tasks are executed within precise timing constraints, crucial for systems where timing is critical.
2. **Complexity**: Generally simpler than a traditional embedded OS, focusing on deterministic behavior and minimal latency.
3. **Predictability**: Provides strict timing guarantees, ensuring that critical tasks meet deadlines. It supports predictable task switching and response times.
4. **Resource Utilization**: Designed to be highly efficient with minimal resource overhead to meet real-time requirements.
5. **Examples**: FreeRTOS, VxWorks, QNX, Micrium.
**Usage**:
- **Automotive Systems**: Airbag control systems, ABS (Anti-lock Braking Systems).
- **Industrial Control**: Robotics, machine control systems.
- **Medical Devices**: Pacemakers, infusion pumps.
- **Telecommunications**: Network routers, switches.
### **Key Differences**
1. **Timing Guarantees**:
- **Embedded OS**: May not provide strict timing guarantees. Suitable for applications where timing is important but not mission-critical.
- **RTOS**: Provides precise timing guarantees and predictable response times. Essential for applications where timing constraints are critical.
2. **Complexity and Features**:
- **Embedded OS**: Often more complex with additional features like advanced networking, user interfaces, and multi-tasking.
- **RTOS**: More focused on efficient task scheduling and minimal latency, often with fewer features and a simpler design.
3. **Resource Utilization**:
- **Embedded OS**: Might use more resources, depending on the features and functionalities provided.
- **RTOS**: Designed to use minimal resources to maintain real-time performance.
4. **Application Scope**:
- **Embedded OS**: Used in a wide range of embedded applications, from consumer electronics to industrial machinery.
- **RTOS**: Used in systems where meeting real-time constraints is crucial, such as aerospace, automotive, and medical applications.
In summary, while both embedded OS and RTOS are used in embedded systems, the choice between them depends on whether you need real-time performance or a more general-purpose system with broader features.
The terms **Embedded Operating System (OS)** and **Real-Time Operating System (RTOS)** are often used in the context of specialized computing systems, but they refer to different types of operating systems with distinct characteristics. Here's a detailed comparison between the two:
### 1. **Purpose and Design**
**Embedded OS:**
- **Purpose:** Designed for embedded systems, which are dedicated to specific tasks or functions within larger systems. Examples include consumer electronics, medical devices, and industrial machines.
- **Design:** Focuses on optimizing resource use, such as CPU, memory, and storage, to fit the constraints of embedded hardware. It may support a broad range of applications but is typically designed to be lightweight and efficient.
**RTOS:**
- **Purpose:** Designed to meet the timing and performance requirements of real-time applications. These applications often involve tasks that must be completed within strict time constraints, such as in automotive control systems or robotics.
- **Design:** Focuses on predictable and deterministic behavior, ensuring that critical tasks are completed within defined deadlines. This involves features like priority-based scheduling and minimal interrupt latency.
### 2. **Scheduling**
**Embedded OS:**
- **Scheduling:** May use various scheduling algorithms, including non-real-time methods like round-robin or priority-based scheduling. The emphasis is often on general efficiency rather than meeting precise timing requirements.
**RTOS:**
- **Scheduling:** Employs deterministic scheduling algorithms, such as Rate Monotonic Scheduling (RMS) or Earliest Deadline First (EDF). The goal is to guarantee that high-priority tasks are executed within their deadlines, often using priority-based preemptive scheduling.
### 3. **Determinism and Responsiveness**
**Embedded OS:**
- **Determinism:** Not always guaranteed. While some embedded OSes can be designed to have deterministic behavior, it is not a primary focus for all embedded systems.
- **Responsiveness:** General responsiveness is good but may not be suitable for applications requiring strict real-time performance.
**RTOS:**
- **Determinism:** A key feature. RTOSes are engineered to offer high determinism, ensuring predictable and reliable performance for real-time applications.
- **Responsiveness:** Optimized for low-latency and high responsiveness to ensure timely handling of critical tasks.
### 4. **Resource Management**
**Embedded OS:**
- **Resource Management:** Often includes a variety of services and features that can be customized to the needs of the embedded application. Resource management is designed to balance performance and efficiency.
**RTOS:**
- **Resource Management:** Tailored to provide minimal overhead and efficient management of resources to meet real-time requirements. It often includes mechanisms to handle high-priority tasks with minimal delays.
### 5. **Complexity and Features**
**Embedded OS:**
- **Complexity:** May be more complex, offering a rich set of features and support for a wide range of applications and peripherals.
- **Features:** Can include support for networking, file systems, and advanced user interfaces, depending on the specific embedded application.
**RTOS:**
- **Complexity:** Typically less complex, focusing on essential real-time features. It might have a smaller footprint and fewer features compared to general-purpose embedded OSes.
- **Features:** Emphasizes real-time capabilities such as task prioritization, inter-task communication, and synchronization mechanisms.
### 6. **Examples**
**Embedded OS:**
- Examples include Linux-based distributions (e.g., Embedded Linux), Android (in embedded contexts), and proprietary systems like QNX Neutrino and VxWorks.
**RTOS:**
- Examples include FreeRTOS, VxWorks (in its real-time variant), QNX Neutrino (also used as a real-time OS), and Micrium.
In summary, while both Embedded OS and RTOS are used in specialized computing environments, an Embedded OS is generally designed for specific tasks with a focus on resource efficiency, whereas an RTOS is specifically engineered to handle real-time constraints with deterministic behavior.
### 1. **Purpose and Design**
**Embedded OS:**
- **Purpose:** Designed for embedded systems, which are dedicated to specific tasks or functions within larger systems. Examples include consumer electronics, medical devices, and industrial machines.
- **Design:** Focuses on optimizing resource use, such as CPU, memory, and storage, to fit the constraints of embedded hardware. It may support a broad range of applications but is typically designed to be lightweight and efficient.
**RTOS:**
- **Purpose:** Designed to meet the timing and performance requirements of real-time applications. These applications often involve tasks that must be completed within strict time constraints, such as in automotive control systems or robotics.
- **Design:** Focuses on predictable and deterministic behavior, ensuring that critical tasks are completed within defined deadlines. This involves features like priority-based scheduling and minimal interrupt latency.
### 2. **Scheduling**
**Embedded OS:**
- **Scheduling:** May use various scheduling algorithms, including non-real-time methods like round-robin or priority-based scheduling. The emphasis is often on general efficiency rather than meeting precise timing requirements.
**RTOS:**
- **Scheduling:** Employs deterministic scheduling algorithms, such as Rate Monotonic Scheduling (RMS) or Earliest Deadline First (EDF). The goal is to guarantee that high-priority tasks are executed within their deadlines, often using priority-based preemptive scheduling.
### 3. **Determinism and Responsiveness**
**Embedded OS:**
- **Determinism:** Not always guaranteed. While some embedded OSes can be designed to have deterministic behavior, it is not a primary focus for all embedded systems.
- **Responsiveness:** General responsiveness is good but may not be suitable for applications requiring strict real-time performance.
**RTOS:**
- **Determinism:** A key feature. RTOSes are engineered to offer high determinism, ensuring predictable and reliable performance for real-time applications.
- **Responsiveness:** Optimized for low-latency and high responsiveness to ensure timely handling of critical tasks.
### 4. **Resource Management**
**Embedded OS:**
- **Resource Management:** Often includes a variety of services and features that can be customized to the needs of the embedded application. Resource management is designed to balance performance and efficiency.
**RTOS:**
- **Resource Management:** Tailored to provide minimal overhead and efficient management of resources to meet real-time requirements. It often includes mechanisms to handle high-priority tasks with minimal delays.
### 5. **Complexity and Features**
**Embedded OS:**
- **Complexity:** May be more complex, offering a rich set of features and support for a wide range of applications and peripherals.
- **Features:** Can include support for networking, file systems, and advanced user interfaces, depending on the specific embedded application.
**RTOS:**
- **Complexity:** Typically less complex, focusing on essential real-time features. It might have a smaller footprint and fewer features compared to general-purpose embedded OSes.
- **Features:** Emphasizes real-time capabilities such as task prioritization, inter-task communication, and synchronization mechanisms.
### 6. **Examples**
**Embedded OS:**
- Examples include Linux-based distributions (e.g., Embedded Linux), Android (in embedded contexts), and proprietary systems like QNX Neutrino and VxWorks.
**RTOS:**
- Examples include FreeRTOS, VxWorks (in its real-time variant), QNX Neutrino (also used as a real-time OS), and Micrium.
In summary, while both Embedded OS and RTOS are used in specialized computing environments, an Embedded OS is generally designed for specific tasks with a focus on resource efficiency, whereas an RTOS is specifically engineered to handle real-time constraints with deterministic behavior.
Applied Physics
Signals and Systems

Digital Electronics
Basic Concepts
Basic Laws
Units

Ohmic Resistors
Capacitors and Inductors

RC Circuit
First-Order Circuits
Second-Order Circuits
Principles Of Circuit Analysis
Sinusoids and Phasors
AC Steady-State Analysis
Single Phase A.C. Circuits
Three-Phase Circuits
Resonance In Series And Parallel Circuits
Network Theorems
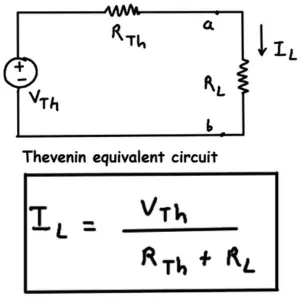
Thevenin's Theorem
Two-port Networks
Digital Electronics
Oscilloscope
Ohmmeter
Voltmeter
Ammeter

Induction Motor
Transformer
Operational Amplifiers
Components
Symbols
Formulas

EE Notes
EE Dictionary
MCQ Quiz

Interview Q&A
Power Electronics Book
Advanced Calculator
Basic Calculator
Simulator

Videos

Q&A

Capacitance Meter
Two Way Switch
Electrical Machines
Power Electronics

Electrical Drives & Their Control

Electrical Safety & Standards
Basics of Electronics Engineering
Electromagnetic Fields
Electrical Machines

More Items Coming Soon...